


Afin d’assurer la fiabilité de ces moyens de transport, il apparaît urgent de travailler à l’élaboration de nouveaux systèmes de navigation robustes. Outre le véhicule autonome de demain, les applications de ces systèmes de navigation sont nombreuses : l’exploration d’environnements ayant subi des dégâts considérables (comme après un tremblement de terre), d’infrastructures urbaines, mais aussi à l’occasion d’exploration extra-terrestre, dont on peut citer les rovers Curiosity (NASA) et Exo-Mars (ESA) ; le transport de biens et de personnes sur de longues distances (livraison par des drones ou des robots terrestres mobiles) ; l’inspection et le ramassage automatiques des récoltes dans les champs ; la navigation maritime ; et enfin les applications militaires comme les missions de reconnaissance.
En nous inspirant des fourmis du désert, nous avons développé AntBot, un petit robot à six pattes capable de se déplacer et surtout de se guider sans GPS.
Les techniques traditionnelles de localisation
Le GPS civil est à ce jour la principale méthode utilisée pour se localiser sur notre planète. On le retrouve dans une multitude d’objets du quotidien tels que les téléphones portables, les voitures, et même les montres connectées. Pourtant sa précision reste variable, avec une précision de l’ordre de 5 mètres dans des conditions d’utilisation standard (ciel dégagé, pas d’occlusion). En milieu urbain, la précision du GPS est facilement altérée par les interférences électromagnétiques, mais également les interruptions de signal dues au blocage des signaux par les arbres et les immeubles.
D’autres stratégies de navigation existent, à l’image des systèmes utilisant des caméras plus ou moins sophistiquées assurant une utilisation convenable en milieu extérieur selon les conditions d’éclairement. Toutefois, ces solutions sont coûteuses en termes de mise en œuvre (temps de traitement de l’information élevé et nécessitant d’importantes ressources calculatoires). Des alternatives novatrices bio-inspirées (inspirées de la nature) font peu à peu leur apparition, à l’image des caméras dites événementielles : ne voyant que ce qui bouge.
On peut également citer l’emploi d’accéléromètres et de gyroscopes, capables de mesurer des informations relatives au mouvement du véhicule ou du robot.
Ces technologies sont cependant sensibles aux effets de dérive à long terme et aux perturbations électromagnétiques, très présentes en milieu urbain et limitent ainsi leur utilisation.
Le pari de la bio-inspiration
Chaque système de navigation ainsi décrit présente son lot d’avantages et d’inconvénients au regard du contexte dans lequel il est employé. Des exemples de fusions de données existent déjà, à l’instar des projets de voitures autonomes impulsés par Google et Tesla, mais le Saint Graal de la navigation autonome reste à déterminer, pour peu qu’il existe !
Étant données les connaissances de plus en plus fines des comportements navigationnels des animaux, et fort d’une approche pluridisciplinaire de la science au sein de notre équipe, nous avons choisi de nous intéresser aux stratégies de navigation des fourmis du désert, particulièrement celles du genre Cataglyphis que l’on trouve sur le pourtour méditerranéen, ou encore les fourmis Melophorus qui vivent en Australie.

Ces fourmis sont connues pour leurs aptitudes remarquables à s’orienter dans des environnements arides et hostiles. Ces navigatrices hors-pair peuvent parcourir plusieurs centaines de mètres et retrouver leur nid sans utiliser de pistes de phéromones comme le font leurs cousines européennes. En effet, les fourmis du désert utilisent un ensemble d’informations proprioceptives, c’est-à-dire la perception de la position de chaque partie du corps, et visuelles pour déterminer le chemin à prendre afin de rentrer au nid ou de retourner sur un lieu d’intérêt (nourriture).
Pour naviguer, les fourmis du désert peuvent utiliser plusieurs modes de localisation parmi lesquels on peut citer les deux principaux :
– l’intégrateur de chemin qui requiert des indices odométriques (comptage de foulées, défilement optique du sol) et d’orientation (polarisation de la lumière du ciel) ;
– le guidage visuel permettant de retrouver un chemin par reconnaissance de scènes visuelles, du profil de la ligne d’horizon, ou par comparaison avec des panoramas mémorisés préalablement.
L’intégrateur de chemin est souvent décrit comme le fil d’Ariane des fourmis du désert. Un nombre conséquent d’études sur les fourmis du désert mais également d’autres insectes comme le criquet, le grillon, ou encore la sauterelle, ont cherché à comprendre les mécanismes de détection et d’analyse de la polarisation de la lumière du ciel afin d’en extraire une information de cap. Ces insectes sont capables de détecter l’angle de polarisation linéaire, c’est-à-dire l’angle avec lequel la lumière se propage, dans le domaine spectral ultraviolet (UV).
Au vu de ces éléments de littérature, le choix de l’intégrateur de chemin comme alternative minimaliste aux techniques de navigation traditionnelles s’est naturellement imposé en vue notamment de se substituer à celles-ci en cas d’échec, ou bien d’être utilisé comme mécanisme complémentaire visant à consolider la robustesse de l’estimation de position.
AntBot, un robot fourmi autonome
La robotique hexapode bénéficie d’une histoire en recherche et développement vieille de 50 ans. En dépit de notre connaissance accrue des procédés de locomotion, aucun projet de navigation autonome ne semble avoir vu le jour avec ces robots. Nous avons donc conçu un robot hexapode imprimé en 3D en s’inspirant directement de la morphologie de la fourmi pour se déplacer.
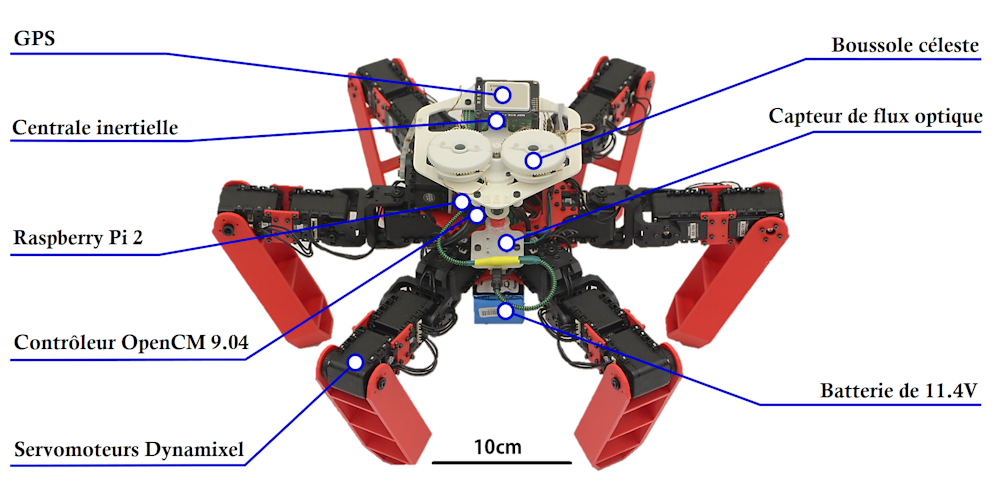
Intrinsèquement conditionné par les paradigmes de la bio-inspiration et du biomimétisme, ce robot insectoïde, appelé AntBot, s’avère offrir un spectre de possibilités bien plus vaste. Il est équipé d’une boussole céleste à deux pixels, sensible à la polarisation de la lumière du ciel en bande UV, reproduisant ainsi l’aire dorsale marginale de l’œil composé des fourmis et permettant de déterminer l’angle de polarisation de la lumière du ciel avec une précision de 0,4°. Cet angle est alors utilisé en tant que cap lorsque le robot navigue.
Comment utiliser la polarisation céleste pour s’orienter ? De manière simple, c’est en quelque sorte comme si dans le ciel se dessinait une droite ; cette droite sert alors de référence et il est possible de l’utiliser pour connaître son cap lorsque l’on se déplace.
AntBot est également doté d’un capteur de flux optique constitué de seulement 12 pixels et permettant de mesurer la vitesse de déplacement du robot sans être perturbé par les variations abruptes de luminosité ambiante pouvant se produire en extérieur. Cette vitesse optique est alors intégrée pour déterminer la distance parcourue. Enfin, AntBot est capable de compter ses foulées par simple mémorisation de la commande motrice. La fusion de l’odométrie par flux optique et du podomètre permettent d’obtenir une estimation de distance très précise et robuste.
Dans notre étude parue dans Science Robotics, AntBot a montré des performances de navigation remarquables, avec une erreur de localisation centimétrique 50 fois inférieure à la précision du GPS civil. En outre, les retombées en termes de réflexion sur la plausibilité de ces modèles biologiques sont une raison significative de parier sur la robotique à pattes pour tester notre intégrateur de chemin. Les travaux à venir se focaliseront principalement sur l’adaptation de ce système à une utilisation de nuit afin d’assurer son utilisation à des fins de navigation (véhicule autonome, robotique de service, etc.).
Article publié sur le site : https://theconversation.com/apres-antman-decouvrez-antbot-le-petit-robot-qui-navigue-sans-gps-116700
Auteur : Julien Dupeyroux
Cet article est republié à partir de The Conversation sous licence Creative Commons.
Dernière modification le jeudi, 09 mai 2019











